Curious about Curiosity? Here’s the tech behind NASA’s Mars rover images
posted Thursday, August 9, 2012 at 10:15 AM EDT
 Earlier this week, NASA's Mars Science Laboratory probe completed a 253-day trip to Mars. On arrival, it successfully deployed the Curiosity rover, which will spend the next couple of years analyzing the Martian surface. The mission has several goals: to determine whether Mars could have supported life at any point in its history; to characterize the climate and geology; and to prepare for the possibility of future human exploration. Along the way, Curiosity will be transmitting a vast quantity of photos from Mars, and as photographers we're thrilled by the prospect!
Earlier this week, NASA's Mars Science Laboratory probe completed a 253-day trip to Mars. On arrival, it successfully deployed the Curiosity rover, which will spend the next couple of years analyzing the Martian surface. The mission has several goals: to determine whether Mars could have supported life at any point in its history; to characterize the climate and geology; and to prepare for the possibility of future human exploration. Along the way, Curiosity will be transmitting a vast quantity of photos from Mars, and as photographers we're thrilled by the prospect!
Curiosity is quite a bit larger than NASA's earlier Sojourner, Spirit, and Opportunity rovers, the last of which is still operating long after its originally-planned mission ended. It's similar in weight and length to a Toyota iQ passenger car, but almost a third wider, and a little taller. Like the earlier rovers, it's not a speed demon, capable of travelling a maximum of around 1.3 miles per day under ideal conditions. The plan is that it will traverse some twelve miles or so, over the next two years. While it's still a few weeks from the anticipated rolloff, some very interesting imagery has already started to appear.
 |
|
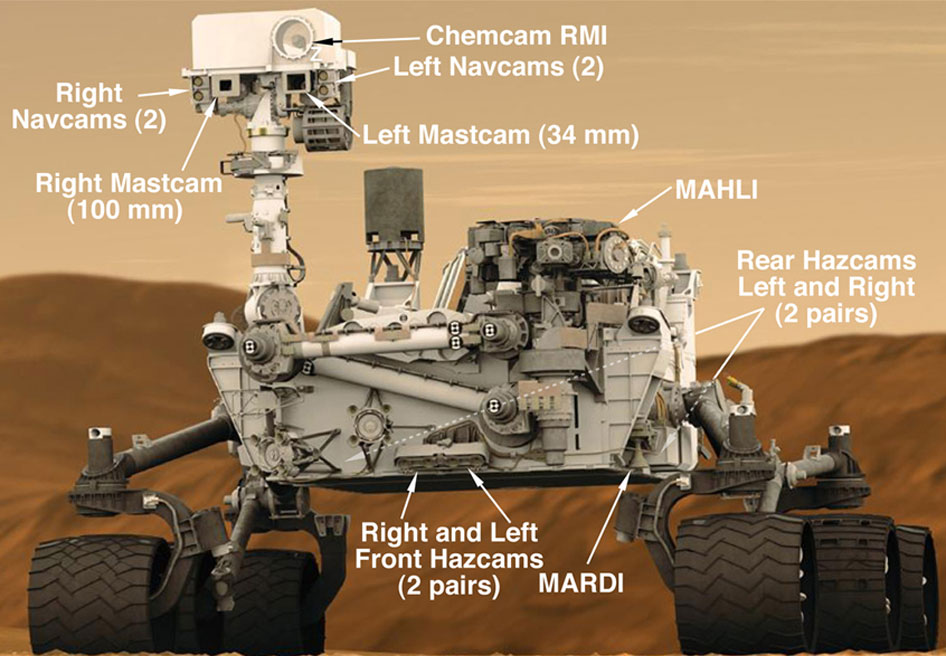
The locations of all seventeen cameras on the Curiosity rover. Rendering provided by NASA/JPL-Caltech. |
For the photographers among us, the Curiosity rover is absolutely covered in photo gear; there are no less than 17 different cameras arrayed around its body and on a mast that is raised from the top deck. The mast itself supports two color Mastcam cameras, while two further color cameras are the chassis-mounted MARDI (Mars Descent Imager), and the articulated MAHLI (Mars Hand Lens Imager), which is mounted on Curiosity's robotic arm. There's also a Remote Micro-Imager camera that's part of the ChemCam instrument package, and no less than twelve black-and-white cameras used for navigation and hazard avoidance. (Four of these are on the mast, and the remainder on Curiosity's chassis.)
 |
 |
|
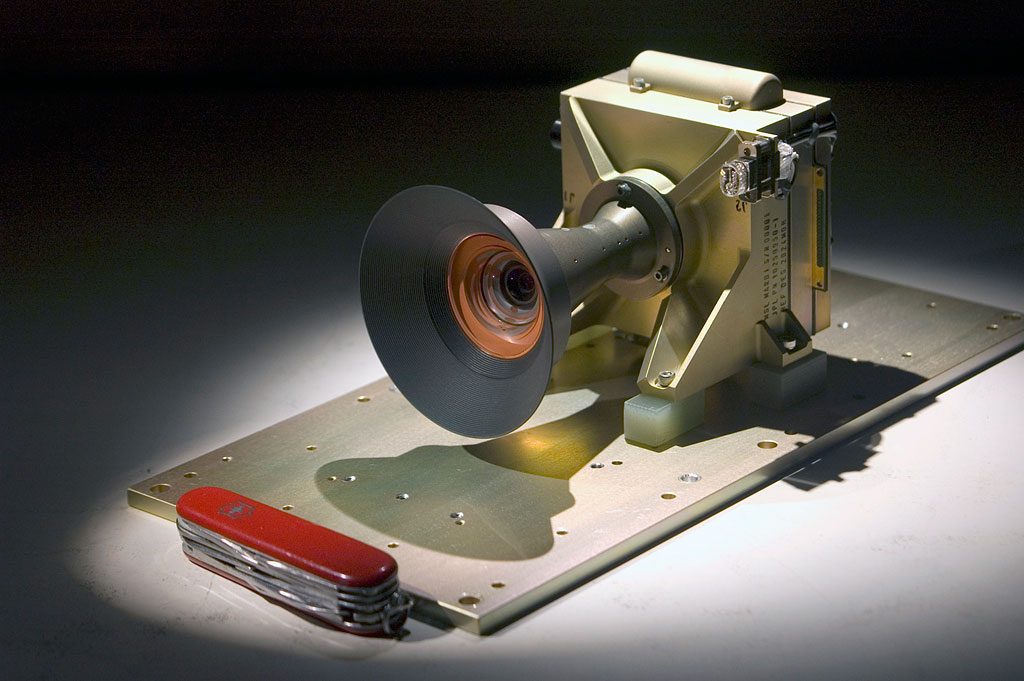
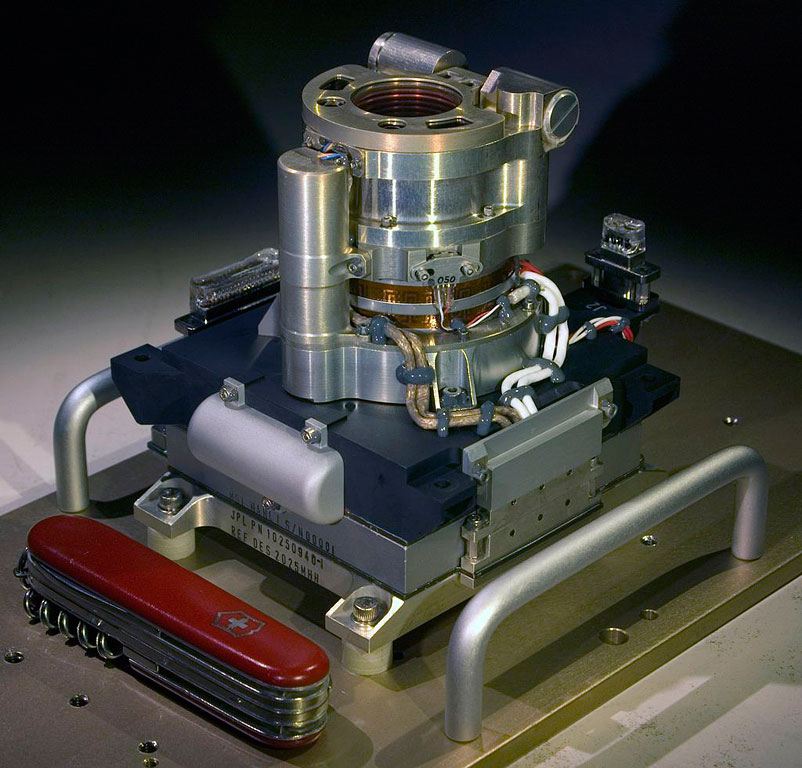
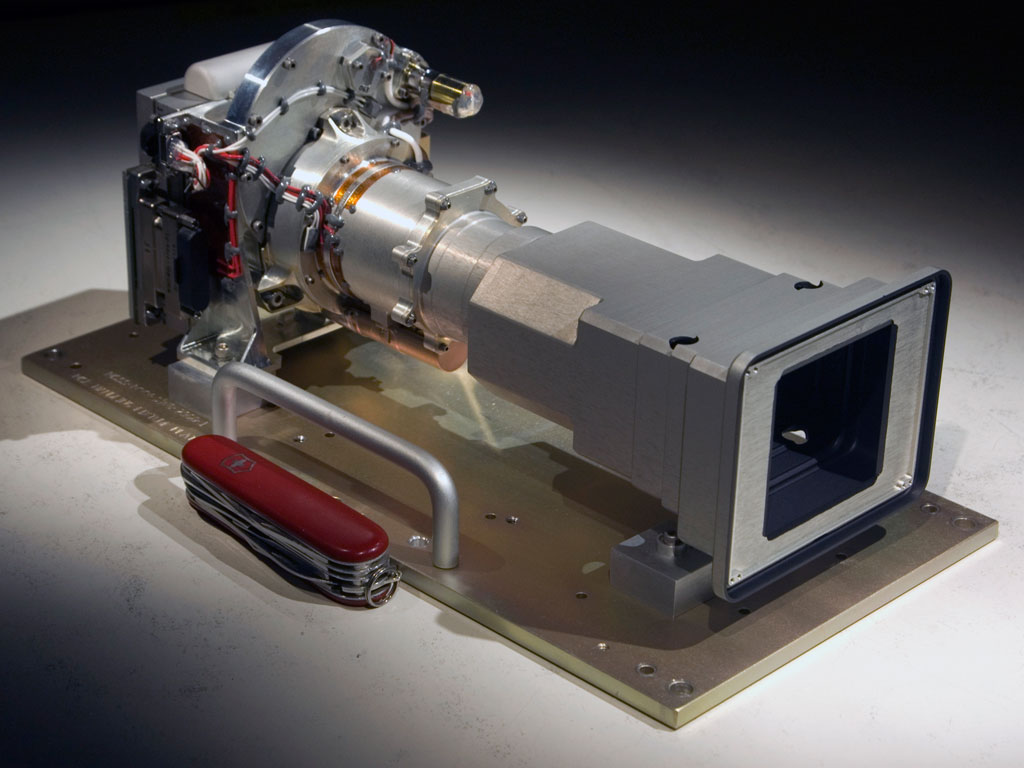
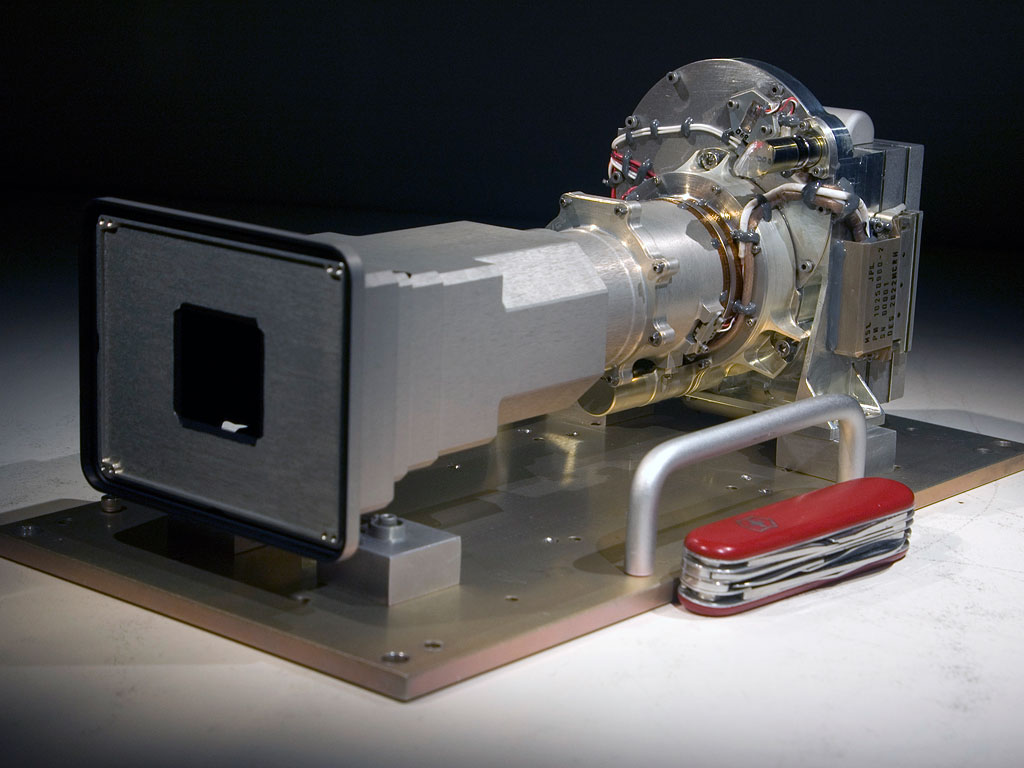
The Mars Descent Imager (left) and Mars Hand Lens Imager (right) cameras. Photos provided by NASA/JPL-Caltech/Malin Space Science Systems. |
|
The most interesting of these for photographers will be MARDI, MAHLI, and the Mastcams. All four share many design elements, with basically the same camera head and focal plane assembly, but differing optics. They're based around Bayer-filtered Kodak KAI-2020CM CCD image sensors, with a 7.4 micron pixel size. Each sensor has an output resolution of 1,600 x 1,200 pixels, although this is cropped to 1,200 x 1,200 px for the Mastcams.
 |
|
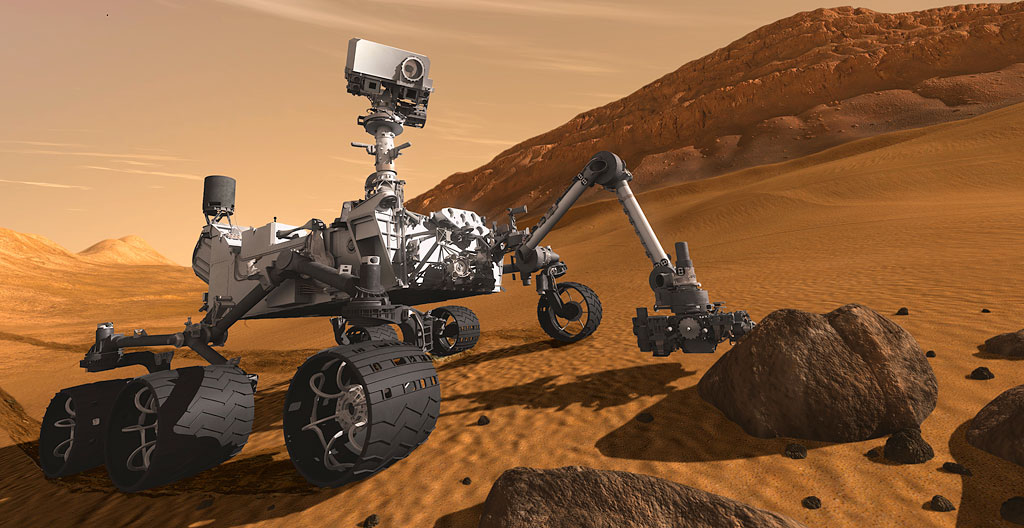
Artist's rendering of the Curiosity rover examining a martian rock with its articulated arm. Image provided by NASA / JPL. |
With even consumer SLRs sporting sensors with 24 megapixel resolution these days, a natural question is why we're relying on cameras with 1.4 to 1.9 megapixels on a once-in-a-lifetime Mars exploration. We're hoping to bring you more details from mission scientists once the initial frenzy dies down a little, but can make some educated guesses as to the reasons for using such seemingly limited sensor chips:
-
This was a long time coming. Space missions involve years of planning and development, so components are usually selected years before the final flight date. In the case of the Mars Science Landing mission, the first call for proposals for Curiosity's scientific instruments was in April 2004, and eight proposals were selected on December 14th of that year. Most hardware development was completed by November of 2008, so the designs were certainly frozen at that time, and probably much earlier. So we're not talking about 2012 technology, but tech from 2004. Back then, 2 megapixels wasn't all that shabby.
-
Size matters. Even with a nearly 2,000-pound (899kg) rover, you still have to watch every gram of added weight. In the photography arena, this boils down to sensor size: To an order of approximation, the smaller the sensor, the smaller the optics can be, which means the smaller the mounting gimbal, etc, etc. At 13.38 x 9.52mm, Curiosity's main sensor is close to the size of the chips in Nikon's 1 series cameras (13.2 x 8.8mm), considerably smaller than even crop-frame DSLRs (typically 23.6 x 1.57mm or so). So there's less space to pack the pixels into.
-
Megapixels aren't everything. It's not too hard to stitch larger images together from smaller ones, so fewer megapixels combined with a more telephoto lens makes a lot of sense, particularly when you want the best images possible from the limited sensor area you have to work with. So nice, big 7.2 micron pixels are much to be desired for their improved signal/noise ratio, dynamic range, etc.
-
Don't bite off more than you can chew. A 36-megapixel sensor and 50-megabyte RAW files are dandy when your computer is right at the other end of a USB cable, but when you're "downloading" across a couple of hundred million kilometers, file size is a big concern. While Curiosity has a higher-bandwidth uplink back to Earth than earlier rovers did, it's still pretty limited. With a grand total of 31-32 megabytes per day of transmission capacity, the ability to grab image data in smaller chunks is pretty key.
 |
|
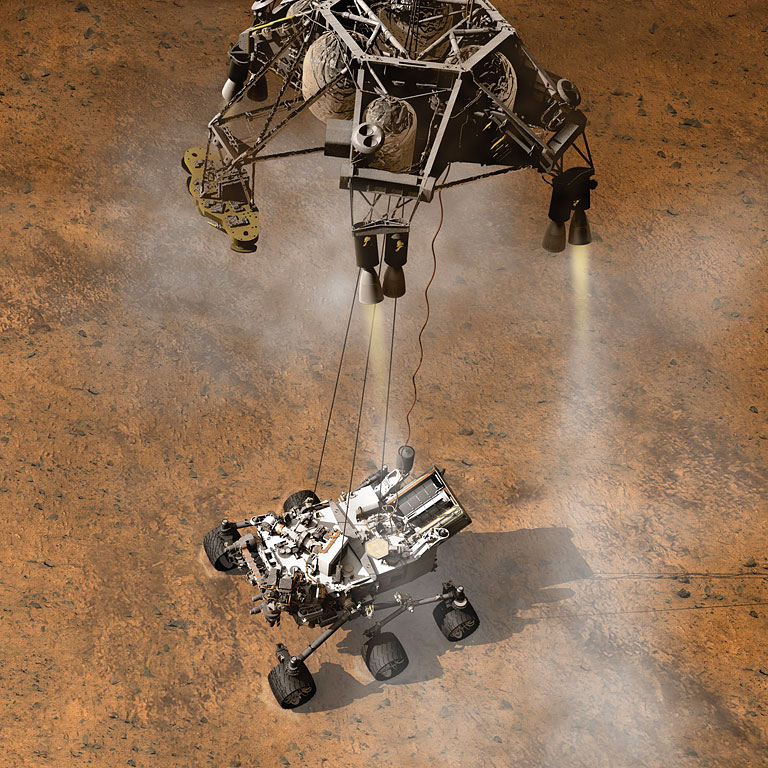
Curiosity's arrival on Mars was unconventional. In a so-called 'sky crane' landing, the rover was lowered on cables beneath the rocket-powered landing stage. Rendering provided by NASA/JPL-Caltech. |
Each camera communicates with Curiosity's MMM Digital Electronics Assembly, which handles camera control--including autofocus and exposure control--as well as data buffering. The DEA contains four discrete 'slices', one per camera. Each includes 128 megabytes of volatile SDRAM buffer memory, and 8 gigabytes of non-volatile NAND buffer memory. The latter is enough to allow for over 4,000 raw images to be buffered at full resolution. (Or, for the cropped Mastcams, over 5,500 raw images.) The Digital Electronics Assembly is capable of receiving some ten megapixels of data per camera, per second, which is enough to provide for 720p high definition video at a reasonable ten frames per second.
 |
|
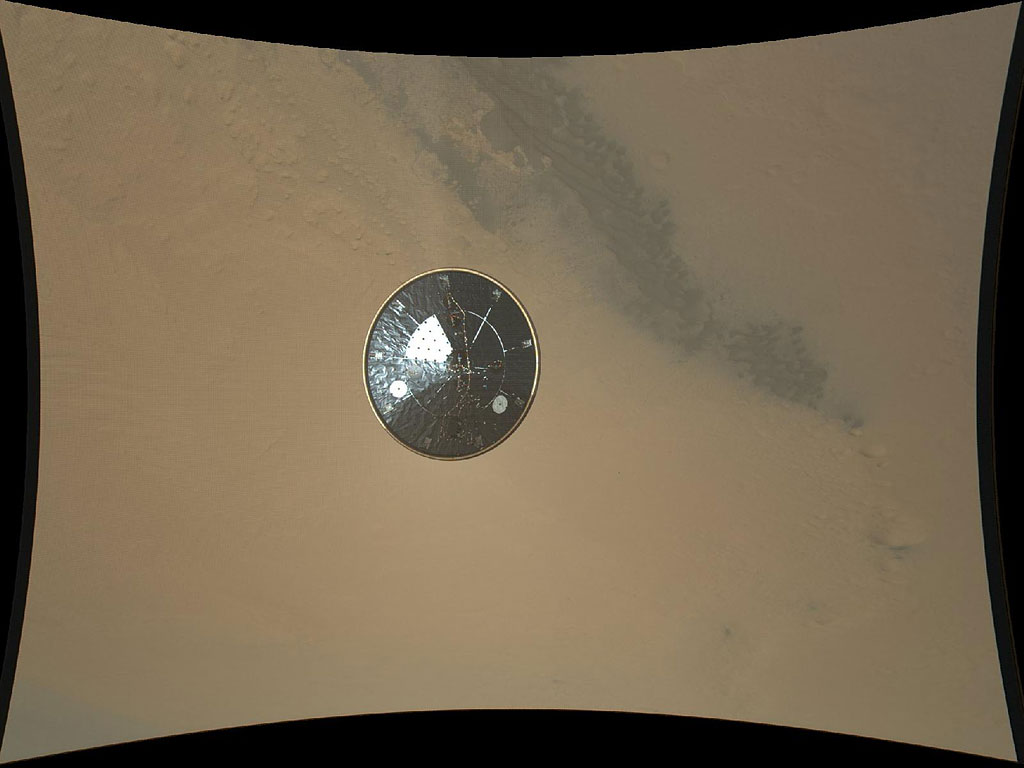
The first public high-res image from the MARDI camera shows the Curiosity rover's heat shield falling away, some three seconds after separation. Photo provided by NASA/JPL-Caltech/MSSS. |
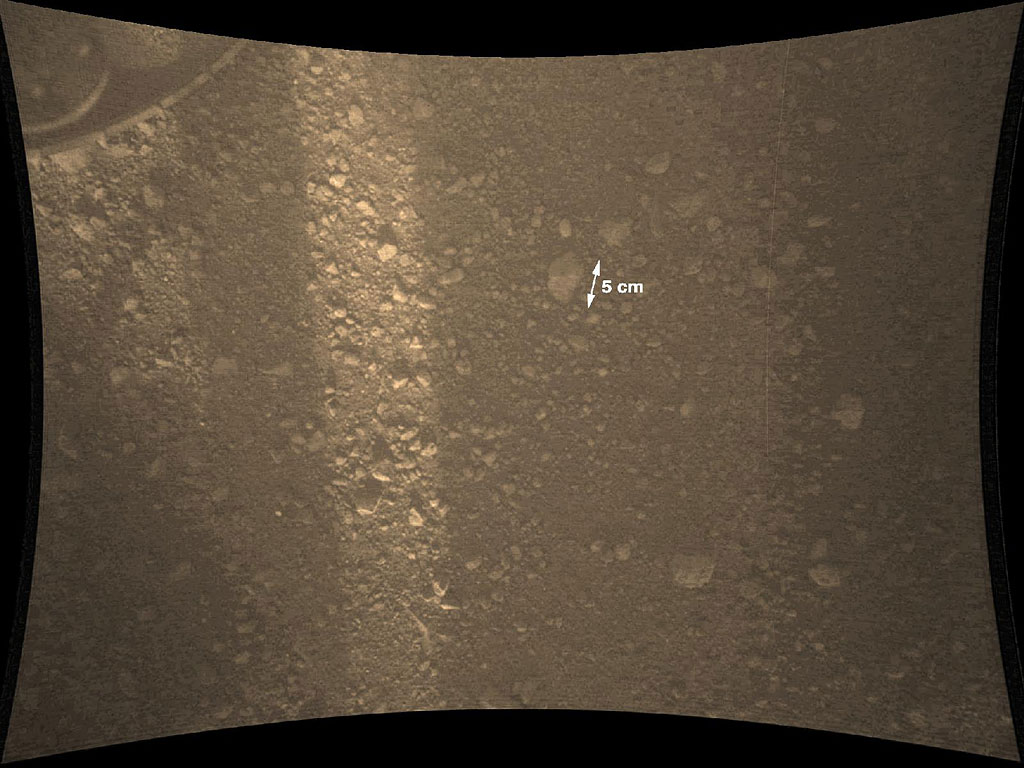
Looking at the cameras, the MARDI was the first to be active, and the first full-resolution 1,600 x 1,200 pixel images from the camera are now available. MARDI is downward-facing and was used at the end of descent, recording high-definition images that could be used to identify the precise landing point from which Curiosity's navigation will begin. MARDI's lens has a 90 degree field of view, and a fixed focus design. Despite a 1.3 millisecond exposure time, NASA is expecting many of MARDI's images will be blurred due both to vibrations and the large angular motions made during descent. MARDI's descent images were recorded at five frames per second, and a clip showing the landing is already available, but as yet only at 192 x 144 pixel resolution. A full-res video is expected to be available within a couple of days. MARDI was designed to record the descent from about two kilometers before touchdown to about two minutes after landing. Although it does continue to offer a downwards-facing view now that Curiosity is on Mars, the closest in-focus distance is about two meters, and the camera itself is currently only 1.7 meters from the surface. That's still close enough to yield a resolution of 1.5mm per pixel pair.
 |
 |
|
MARDI now sits 1.7 meters above the martian surface (left); the pincushion effect removes distortion seen in a MARDI image from the lab (right). Photos provided by NASA/JPL-Caltech, and NASA/JPL-Caltech/Malin Space Science Systems. |
|
True to its "hand lens" name, the MAHLI camera is mounted on Curiosity's robotic arm to allow a close-up view of rocks and regolith (read: loose materials). MAHLI's lens was covered by a dust shield at landing, but this will soon be removed, and it will then offer much higher resolution than in early images. Like MARDI, MAHLI has a full 1,600 x 1,200 pixel resolution. Its sensor sits behind a ten element autofocus lens, capable of focusing from 20.5 mm to infinity. The lens' aperture and field of view vary with focus, starting at f/8.5 and 39.4 degrees at infinity, and falling to to f/9.8 and 34 degrees at the macro position. The close macro allows a resolution up to 13.9 microns per pixel pair. In round numbers, that's about a half a thousandth of an inch, somewhere between a half and a quarter the diameter of a human hair. (That measure obviously depends on whose hair you're talking about.) For positioning relative to a subject, two contact "pokers" are used to determine when the camera has reached the minimum focus distance. Since these can't safely detect the distance from loose materials, a cautious approach is needed so as not to get dust on MAHLI's lens. MAHLI has a very shallow depth-of-field of just 1.6mm at macro, and so offers an onboard focus stacking function that can combine the best-focused portions of eight sequential shots with varied focus, creating a single image with greater depth-of-field. Exposure times will typically vary from 5 to 15 ms, but may reach up to 80 ms in shadow. MAHLI also has white and UV LEDs to help with imaging in shadow or at night, and offers 720p video capability at a rate of seven frames per second.
 |
 |
|
There are two Mastcam cameras on Curiosity: a 34mm f/8 (left), and a 100mm f/10 (right). Photos provided by NASA/JPL/Malin Space Science Systems. |
|
Finally, the most interesting of the group to many will be the dual Mastcam cameras. That's because--unlike those on previous Mars rovers--the Curiosity includes a telephoto lens. Originally, plans called for a stereo pair of 15x zoom lenses, but while these were developed, technical issues and the tight schedule sadly meant they had to be dropped from the mission. Like the MARDI and MAHLI cameras, the Mastcams are based around 1,600 x 1,200 pixel CCD sensors, but both Mastcams have a square crop, and so yield 1,200 x 1,200 pixel images.
 |
 |
|
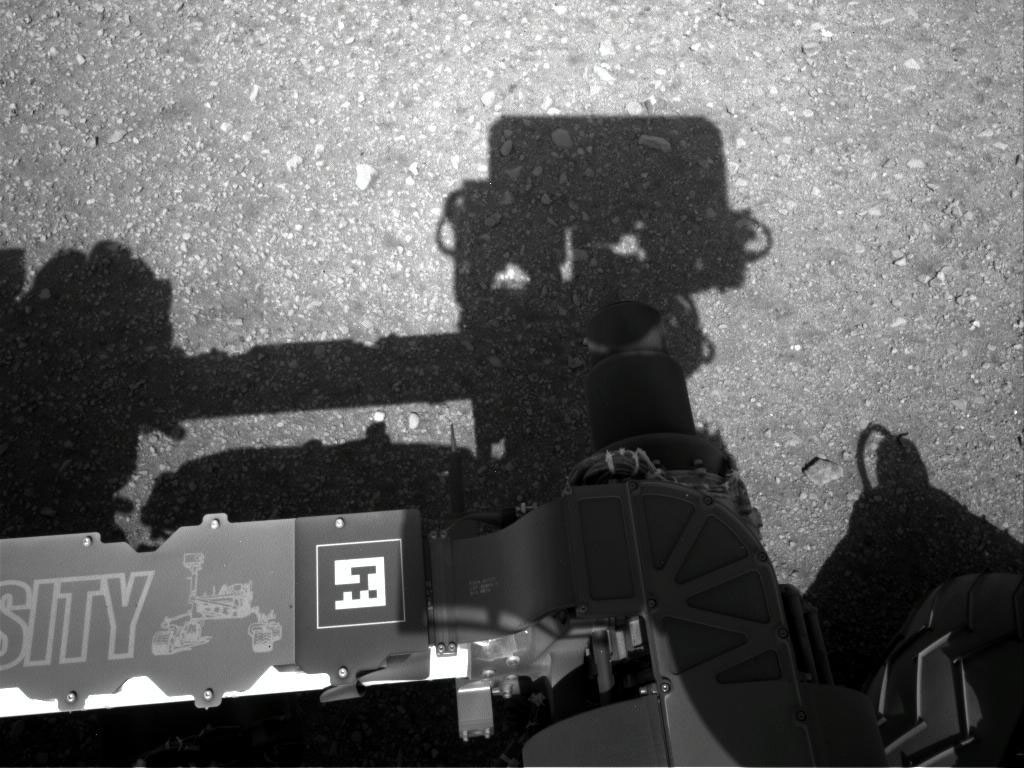
A lot of dust is kicked up on landing, so Curiosity's cameras needed protection. When the dust covers come off, there's a night-and-day difference in image quality, as shown in this Hazard Avoidance camera shot. Photos provided by NASA/JPL-Caltech. |
|
The Mastcam-34 has a 34mm, f/8 lens with 15-degree FOV (roughly the same as a 164mm on a 35mm camera), while the Mastcam-100 boasts a 100mm, f/10 lens with 5.1-degree FOV (a 35mm equivalent of just under 500mm, quite a long tele). Both lenses can focus between 2.1 meters and infinity. For a two-meter focus distance with the M-34 that translates to as little as 450 microns per pixel pair (a little under two hundredths of an inch), while the M-100 yields 150 microns per pixel pair (about 6 thousandths of an inch). With a distant subject a kilometer away, the M-34 images 22 cm per pixel pair, and the M-100 some 7.4 cm per pixel pair.
 |
 |
|
The first image taken by Curiosity's navigation cameras (left) was soon followed by this two-image panorama from the nav cams (right), showing the rim of Gale Crater in the distance. Photos provided by NASA/JPL-Caltech. |
|
In addition to the standard RGBG Bayer color filter array on the image sensor, each Mastcam also has an eight-position filter wheel, which includes a variety of bandpass color filters as well as a neutral density filter. The color filters allow more detailed color analysis than could be obtained from the RGB filters alone, and the neutral density filters will allow the Mastcams to look directly at the sun, for solar observations. It takes around five to eight seconds to change between filters. Exposure times will vary significantly with the filter type in use, but should vary from a few tens to a couple of hundred milliseconds. The mast cameras offer full-resolution still imaging at a little over five frames per second, and 720p video at ten fps.
 |
|
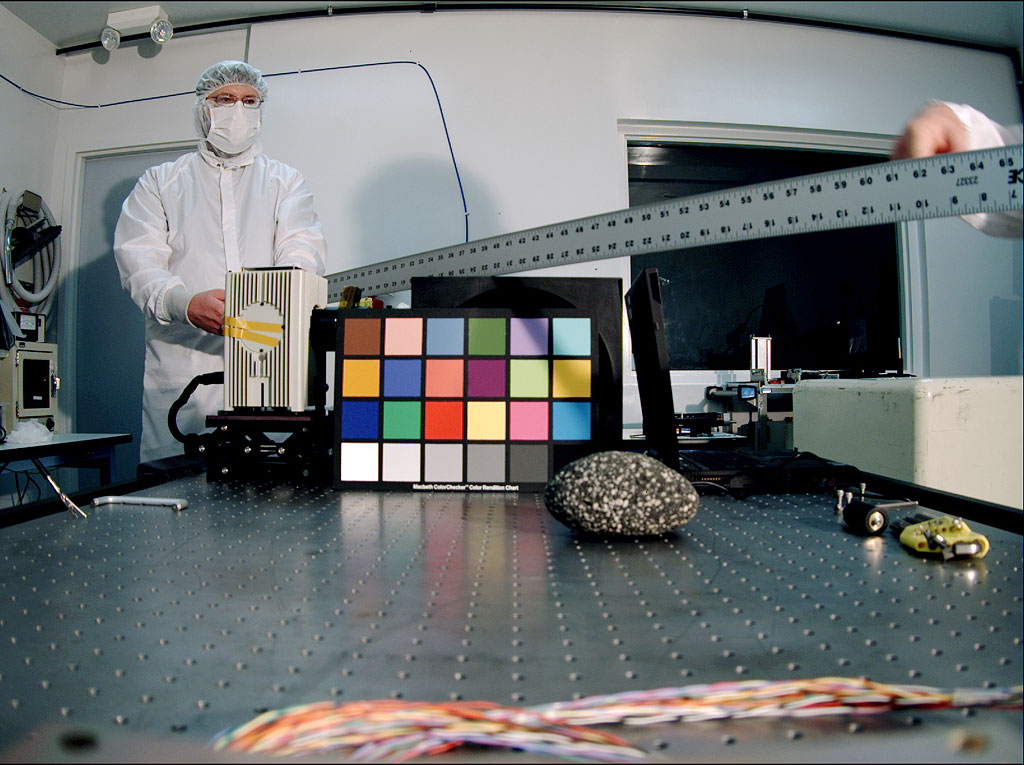
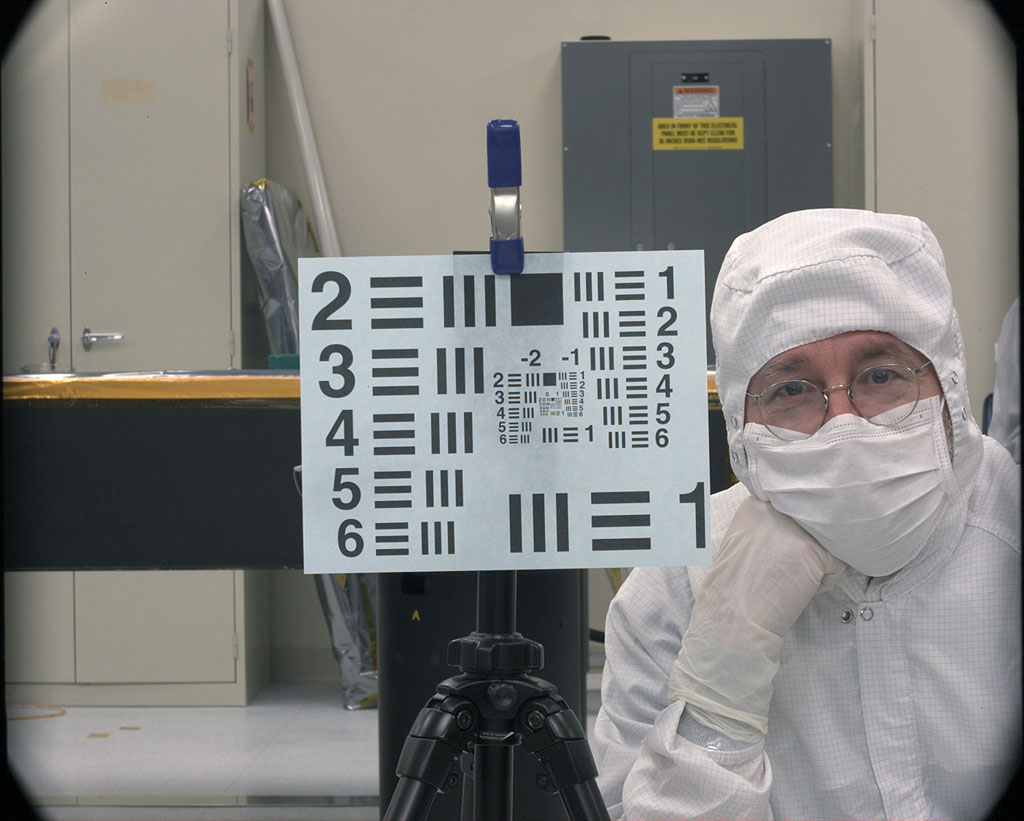
Michael C. Malin, CEO of Malin Space Science Systems, in a test image shot with the Mastcam-34 in the lab. (Click to see what a full-resolution Mastcam image looks like) Photo provided by NASA/JPL/Malin Space Science Systems. |
Together, these four cameras make up Curiosity's color imaging capabilities. Although they're primarily dedicated to navigation and hazard avoidance, the remaining black-and-white cameras--made at the NASA Jet Propulsion Laboratory, and clones of those used on Spirit and Opportunity--will certainly provide some interesting shots as well. The navigation cameras are 1 megapixel resolution, and their lenses cover a 45 degree field of view - That's roughly equivalent to a 50mm "normal" lens on a 35mm camera.
 |
|
Curiosity has already provided its first 360-degree panorama, but only two images are in high resolution thus far, so it's a bit blurry at the ends. Photo provided by NASA/JPL-Caltech. |
Curiosity is currently on its second full Martian day, and a little while ago, NASA announced successful deployment of the rover's mast. To accompany this news, the space agency has released the first full-resolution MARDI images, along with full-res imagery from the the Navcams and Hazcams. More is expected soon, as dust shields continue to be removed and calibration of the various cameras and other components gets under way. If you're curious to see the latest, keep an eye on the official Curiosity rover Twitter feed.
 |
|
The latest generation rover is a lot larger than its predecessors, as demonstrated by this family photo on the JPL's Mars Yard test area. In the left foreground is the flight spare for the first Mars rover, Sojourner (1997). Behind is a Mars Exploration Rover Project test rover, similar to Spirit and Opportunity (2004). At right is a Mars Science Laboratory test rover similar to the current Curiosity. Photo provided by NASA/JPL-Caltech. |